
Flexible Handling
Automatisch programmeren
Activiteiten
Het doel van dit werkpakket is het komen tot een flexibele, effectieve, efficiënte en veilige opzet voor het gerobotiseerd kanten. Hiertoe wordt een plan uitgewerkt (tijd, budget, proces, hardware) en een demonstratie verzorgd.
Vragen waarmee u bij ons terecht kunt
- Hoe integreer ik bewerking en transportactiviteiten in een proces?
- Hoe realiseer ik geautomatiseerde productie?
- Hoe borg ik de veiligheid op de werkplek?
Voorbeelden use cases
- Automatisch programmeren van robot en kantbank.
- Automatische gripper-keuze en instelling
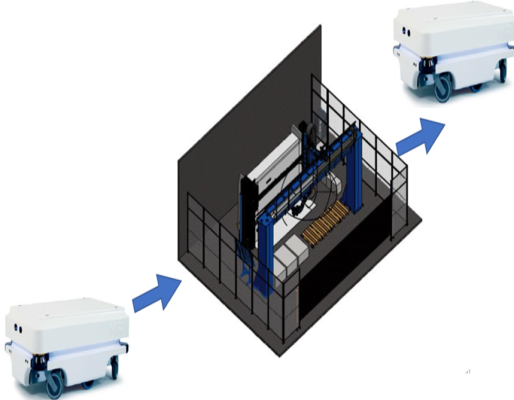
- Demo met dummy kantbank en Yaskawa UR10 cobot
- Demo met automatisch vervoer
Contactpersoon
De Comvoirtse, Janwillem Verschuuren
Werkpakketleider